




1. 밸브 코어 조립 공정의 어려움
본 연구에서는 다른 자동조립 시스템의 설계 경험을 흡수한 후, 기존의 반자동조립 시스템을 분석하고, 시뮬레이션을 통해 시스템의 기계적 부분을 완벽하게 설계하였다.밸브 코어조립 공정. 시스템 설계 계획에서는 기계 부품 가공의 편의성을 높이고, 비용을 최소화하며, 부품 조립을 간단하고 쉽게 만들고, 시스템의 개방성과 확장성을 확보하여 시스템의 신뢰성과 효율성을 높이고, 시스템의 비용 대비 성능을 개선할 수 있는 탄탄한 토대를 마련하고자 노력합니다.
그만큼판막핵심조립 시스템은 기계적 구조 설계 측면에서 크게 세 부분으로 나뉩니다. 즉, 작업대 좌측 상단에 두 개의 조립 부품, 좌측 하단에 세 개의 조립 부품, 그리고 작업대 우측에 일곱 개의 조립 부품이 있습니다. 두 부분으로 구성된 조립의 기술적 어려움은 씰링 링의 원형 형상을 어떻게 확보하느냐에 있습니다. 절단 과정에서 블레이드의 축 방향 압출력을 받기 때문에 변형되기 쉽습니다. 둘째, 조립 과정에서 이송 툴링 부품에서 코어드 로드가 감지되면 진동을 통해 도어 코어의 여러 부품 간의 스크리닝 및 조립을 구현해야 합니다. 따라서 각 부품은 해당 위치에 떨어져 조립 링크가 됩니다. 이러한 공정상의 어려움은 다음과 같습니다. 이러한 문제들은 이 단계에서 밸브 코어 조립의 불량률 증가의 주요 원인입니다. 이를 바탕으로 본 논문에서는 밸브 코어 조립 공정을 최적화하고, 밸브 코어 조립의 품질 검사 시스템을 추가하여 밸브 코어 조립의 품질 보증률을 향상시킵니다.
2. 지능형 밸브 코어 조립 방식
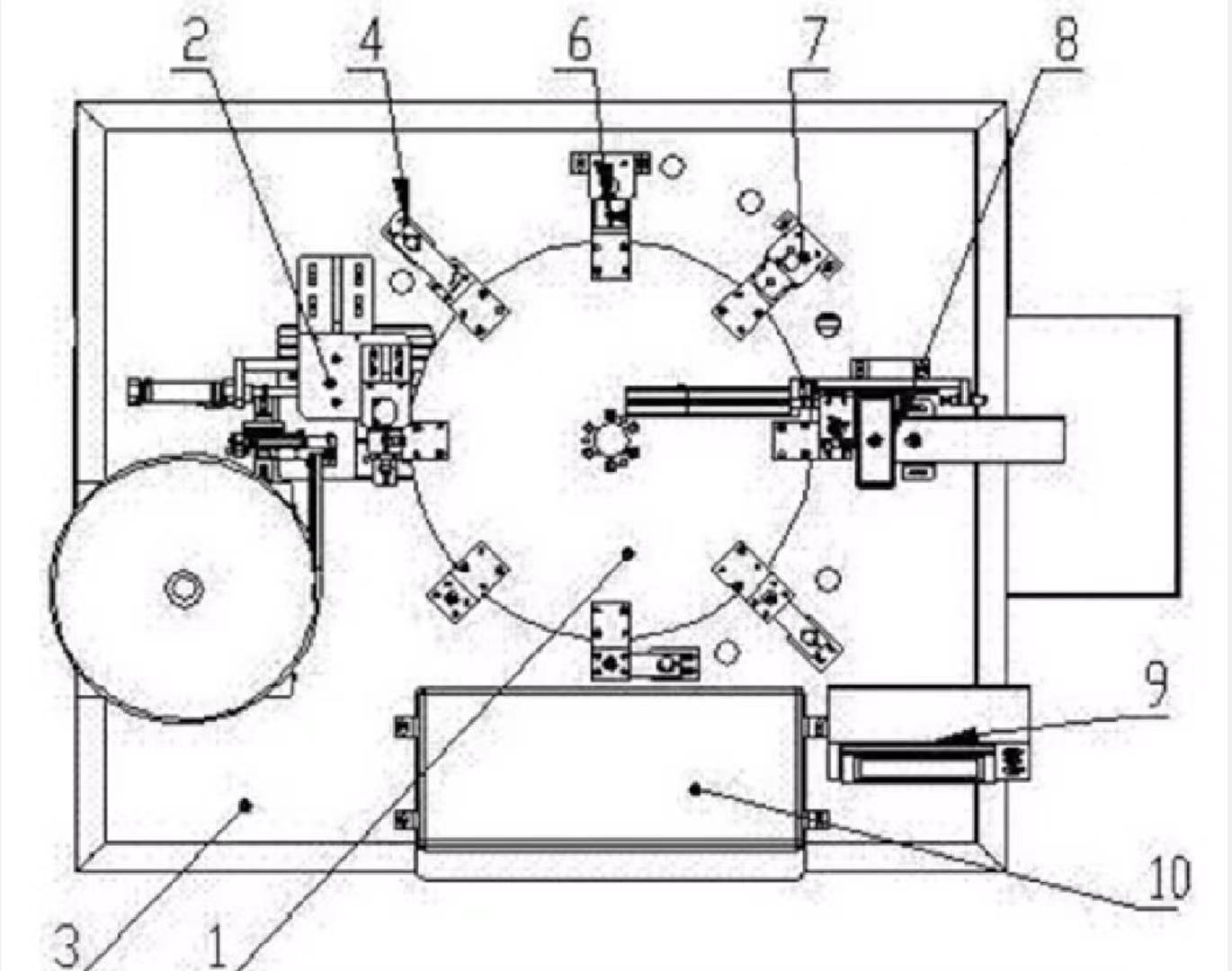
조작 인터페이스와 PLC는 로직 제어부를 구성하며, 감지 시스템과 PLC는 조립 시스템의 상태 데이터를 수집하고 제어 신호를 출력하는 양방향 정보 흐름을 갖습니다. 구동 시스템은 실행부로서 PLC 출력부에 의해 직접 제어됩니다. 수동 지원이 필요한 공급 시스템을 제외한 이 시스템의 다른 공정들은 지능형 조립을 구현했습니다. 터치스크린을 통해 원활한 인간-컴퓨터 상호작용이 구현됩니다. 기계 설계 시 조작 편의성을 고려하여 도어 코어 배치 박스는 터치스크린 옆에 배치되었습니다. 감지 메커니즘, 도어 코어 상단 개방 블로잉 부품, 밸브 코어 높이 감지 부품, 블랭킹 메커니즘은 각각 턴테이블 툴링 부품 주변에 배치되어 도어 코어 어셈블리의 조립 라인 생산 레이아웃을 구현합니다. 감지 시스템은 주로 코어 로드 감지, 설치 높이 감지, 품질 검사 등을 수행하며, 이는 재료 선택 및 밸브 코어 잠금 자동화를 실현할 뿐만 아니라 조립 공정의 안정성과 높은 효율성을 보장합니다. 시스템의 각 유닛 구조는 그림 1에 나와 있습니다..
아래 그림과 같이 턴테이블은 전체 공정의 중심 링크이며, 밸브 코어의 조립은 턴테이블의 구동에 의해 완료됩니다. 두 번째 감지 메커니즘이 조립할 부품을 감지하면 제어 시스템에 신호를 보내고, 제어 시스템은 각 공정 단위의 작업을 조정합니다. 먼저, 진동 디스크가 도어 코어를 흔들어 흡기 밸브 입구에 고정합니다. 첫 번째 감지 메커니즘은 성공적으로 설치되지 않은 밸브 코어를 불량품으로 직접 선별합니다. 구성 요소 6은 밸브 코어의 환기가 적합한지 여부를 감지하고, 구성 요소 7은 밸브 코어의 설치 높이가 기준을 충족하는지 여부를 감지합니다. 위의 세 가지 링크에서 적합한 제품만 양품 상자에 담기고, 그렇지 않은 제품은 불량품으로 처리됩니다.
지능형 어셈블리밸브 코어시스템 설계의 기술적 어려움은 바로 이 때문입니다. 이 설계에서는 3기통 설계를 채택했습니다. 슬라이드 실린더는 배출을 제어하여 배출의 고유성을 보장합니다. 두 번째 실린더는 잠금 로드가 배출구와 정렬되도록 한 후, 슬라이드 실린더와 협력하여 밸브 코어가 잠금 로드에 들어가도록 합니다. 두 번째 실린더는 전체 잠금 메커니즘을 계속 밀어 움직이며, 흡입 노즐은 밸브가 툴링 바닥에 도달하면 밸브를 흡입합니다. 마지막으로 세 번째 실린더가 잠금 메커니즘을 제자리에 밀어 넣으면 서보 모터가 밸브 코어를 흡기 밸브 입구로 보내 밸브 코어 조립을 완료합니다. 이 과정은 종방향 및 횡방향 이동 위치의 정확성과 고유성을 보장하고 도어 코어 조립의 기술적 어려움을 해결하는 좋은 해결책을 제공합니다..
3. 밸브 코어 조립 시스템의 핵심 구성 요소 설계
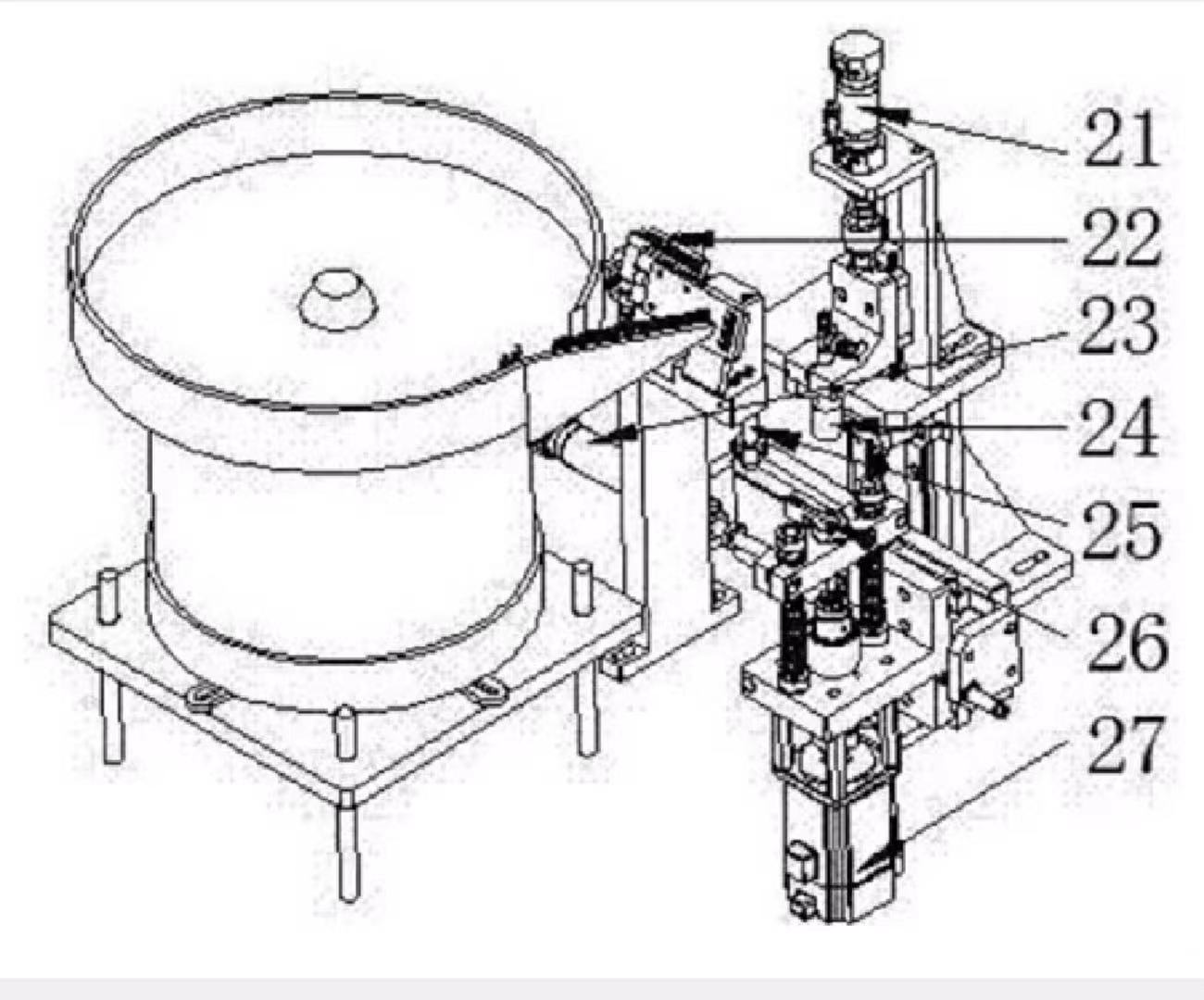
설치의 핵심 프로세스로서밸브 코어밸브에서 밸브 코어 잠금은 밸브 코어 이동 위치의 정확도에 대한 요구 사항이 매우 높기 때문에 종방향 및 횡방향 메커니즘의 조정이 완료되어야 합니다. 이 부분의 설계에서는 밸브 코어의 배출 동작, 잠금 레버의 잠금 동작, 그리고 밸브 코어를 밸브 노즐에 장착하는 동작의 단일 동작으로 분해됩니다. 기계적 구조는 그림 2에 나와 있습니다. 그림 2에서 볼 수 있듯이 밸브 코어 어셈블리의 기계적 구조는 세 부분으로 나뉩니다. 세 부분은 서로 영향을 미치지 않고 조정됩니다. 독립적인 동작이 완료되면 실린더는 메커니즘을 밀어 다음 조립 위치로 이동합니다.
이동 위치의 정확성을 보장하기 위해 전기 제어 및 기계적 한계를 종합적으로 설계하여 오차를 1.4mm 이내로 제어합니다. 밸브 코어와 밸브 노즐 중심은 동축으로 연결되어 서보 모터가 밸브 코어를 밸브 노즐 안으로 부드럽게 밀어 넣을 수 있도록 합니다. 그렇지 않으면 부품이 손상될 수 있습니다. 기계 구조의 정지 또는 전기 신호의 비정상적인 펄스는 조립 작업에 미세한 편차를 유발할 수 있습니다. 결과적으로 밸브 코어 조립 후 통풍 성능이 기준에 미치지 못하고 조립 높이가 적합하지 않아 제품 고장으로 이어집니다. 이러한 요인은 시스템 설계에 충분히 고려되었으며, 공기 분사 감지 및 높이 감지를 통해 불량품을 선별합니다..
게시 시간: 2022년 9월 9일
